Introduction
In the second assignment of using Arc Collector, each student created their own projects. This project focuses on litter in the Eau Claire area. The main question of this research to see where most of the litter in the study area lies. There were four zones where data was collected, housing, bars, park, and campus. The data will hopefully show where more trash cans need to be put in in order to decrease the amount of litter on the ground in Eau Claire. Data was collected using Arc Collector and then edited in ArcGIS Online as well as ArcMap on a desktop. For this project, it was very important to have a proper project design in order to produce accurate results. A set research question was asked and feature classes were created with attributes that made sense to collect. This in turn produced a successful project.
Study Area
The original study area was set before any data was collected. This area ended up being too big when data was being collected. A smaller study area was created based on the points collected. The original and final study areas can be seen in Figure 1 and 2. This data was collected between November 17th to the 21st. The weather throughout these days was quite cold with temperatures ranging from 30-45 degrees (F).
 |
| Figure 1: The original study area for this project. |
 |
| Figure 2: The final study area for this project based upon the data collected. |
Methods
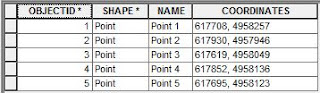
Before going out into the field, the feature classes had to be set up. These classes were area, amount, garbage, description, and notes. Figure 3 below displays all of these fields. Domains were set for area, amount, and garbage. The areas were housing, campus, park, and bars. Amount was 1, 2-5, 6-10, 11-20, 21-30, and >31. Garbage meant whether there was a garbage around. The attributes for this were next to garbage can, within walking distance, visible but far away, and none in sight. Description did not have a domain because it was used to describe what kind of litter was found. For example, plastic bag, beer cans, cigarette butts, etc.
 |
| Figure 3: The fields and their attributes used in collecting litter data. |
After the fields were all set up, they were imported into ArcGIS online. This allowed the class to download their individual maps onto their phones or what ever they were collecting data with. From there, each student was reading go and collect data. Below in Figures 4 and 5 are screenshots of what the collector app looks on the phone used (Samsung Galaxy S6).
 |
| Figure 4: A screenshot of the Arc Collector app interface when collecting data. |
 |
| Figure 5: The interface in Arc Collector when entering a point. |
The data points were collected over a few days. The points were taken while walking down the sidewalk. Most of the litter was either on the sidewalk or in yards by the sidewalk. This means that the points aren't in the exactly precise spot where the litter was found, however it is very close. When it came to a point that represented more than one piece of litter it means that it was obvious when standing in one spot that there were multiple pieces of litter together. If the pieces were separated by some distance than separate points were logged. In total, 69 points were collected.
Results
The results of this assignment are shown below in Figure 6. Figure 6 displays the amount of litter at each point that was collected. It can be seen that there is a lot of litter within the housing and bar areas. There is less on campus and in parks. The greater amount of litter in housing and bars could be attributed to a lot of different causes. For example, intoxicated people throwing empty cans and bottles on the ground, bar patrons throwing cigarette butts on the ground, the people living in these areas only pay rent rather than owning so they don't care about the status of litter in their yard. There are many reasons. There could be less litter in parks and campus because of the higher number of trash cans available, workers who are paid to clean up these areas, people don't see litter on the ground so they don't litter, etc... The causes for the greater or lesser amount of litter in these areas can be attributed to many different reasons.
 |
| Figure 6: The amount of litter at each data point that was collected within the study area. |
Figure 7 shows the points where litter was collected in proximity to where a garbage is located. This map is only partially accurate. The garbage cans in the park area, bar area, and on campus were actual garbage cans that were meant to stay there. The garbage cans in the housing area were garbage cans that belonged to the houses. After looking over the data, it makes sense to exclude these individuals garbage cans. On one of the data collecting days was trash day so this skewed the data in the housing area as well. Ignoring the green points in the housing area it is obvious that there is no permanent garbage cans for residents to throw away their litter. This could be because people would dump their trash in the available bins rather than paying for a trash service. In the other the areas, there were more trash cans readily available, but the amount of litter varied. In the bar areas, the most litter on the ground was typically cigarette butts. People typically stand outside bars and smoke and throw their cigarette butts on the ground. If bars provided ashtrays maybe the amount of cigarette butts on the ground would reduce. As for the litter on campus, most of the litter is right by a trash can or within walking distance. It was found that there was minimal litter on campus, except for right by the trash cans. The litter typically on the ground is gum and small pieces of paper. Perhaps people miss the bin when throwing away their litter or those who empty the bins spill some when emptying them. There are many causes for the litter on the ground along with many solutions to avoid more litter on the ground.
 |
| Figure 7: The data points collected displaying the proximity of litter to garbage cans. |
A web map was also created for this project that was created on ArcGIS online. That map is shown below. It displays the same map as in Figure 6.
Conclusions
This assignment was incredibly useful for future use of data collecting. It required the class to set up feature classes all with their own attributes. It was very important to set this all up correctly or the whole assignment wouldn't have worked. The project proved that there is more litter in the bar and housing areas than in park and on campus. More trash cans could be put in in bar and housing areas, however even these may not help. Other solutions to cleaning up the litter within these areas is to encourage the residents to pick up litter in their yards and clean up after themselves. If this project were to be done again, the only thing that would be changed would be to create points for garbage cans. This would be useful to see them in proximity to where the litter was. It would also be useful to only mark where permanent trash cans are rather that household trash bins as well. This project could be expanded into a larger project if someone wanted to do more research on litter in the Eau Claire area and how to clean up these areas.















































{kind=link}